ROBOTICS | ARM CONFIGURATION
ROBOTICS
INTRODUCTION:
The popular concept
of a robot is of a machine
that looks and works like
a human being.
This humanoid concept has been inspired by science fiction
stories and films
in the twentieth century. The
industrial robots of today may not look the least bit like a human being although
all the research is directed
to provide more and more anthropomorphic and human-like features and
super-human capabilities in these.
To sum up, machines that
can replace human
beings as regards
to physical work and decision making are categorized as robots and their study as robotics.

The robot technology is advancing rapidly.
The industry is moving from the current
state of automation to robotization, to increase productivity and to deliver
uniform quality. Robots
and robot- like manipulators are now commonly
employed in hostile
environment, such as at various
places in an atomic plant for handling
radioactive materials. Robots
are being employed
to construct and repair
space stations and satellites. There
are now increasing number of applications of robots such as in nursing and aiding a patient. Microrobots are being designed
to do damage control inside
human veins. Robot like systems are now employed
in heavy earth-moving equipment. It is not possible
to put up an exhaustive list of robot applications. One type of robot commonly
used in the industry is a
robotic manipulator or simply a manipulator or a robotic
arm. It is an open or closed
kinematic chain of rigid links interconnected by movable joints.
In some configurations, links can be considered to correspond to human
anatomy as waist,
upper arm and forearm with
joints at shoulder and elbow. At the
end of the arm, wrist joint connects
an end-effector to the forearm.
The end-effector may be a tool
and its fixture
or a gripper or any other device
to do the work. The
end effector is similar to human
hand with or without fingers.
A robotic arm, as described
above, is shown in Fig. 1.1, where
various joint movements are also indicated.
ROBOT ANATOMY:
As mentioned in the introduction to the chapter,
the manipulator or robotic
arm has many similarities to the
human body. The mechanical structure of a robot
is like the skeleton in the human body. The robot anatomy
is, therefore, the study of skeleton of robot, that
IS, the physical construction of the manipulator structure. The mechanical structure of a manipulator that
consists of rigid
bodies (links) connected by means of articulations (joints), is segmented into an arm that ensures
mobility and reach ability, a wrist that
confers orientation, and
an end-effector that performs the required task. Most manipulators are mounted on a
base fastened to the floor or on the mobile platform of an autonomous guided
vehicle (AGV). The arrangement of base, arm,
wrist and end-effector is shown in Fig.
1.5.

LINKS:
The mechanical structure of a robotic
manipulator is a mechanism, whose
members are rigid
links or bars. A rigid link that can be connected, at most, with two other links is referred to as a binary link. Figure 1.6 shows two rigid binary
links, 1 and 2, each with two holes at the ends A, B, and C, D, respectively to connect with
each other or to other
links. Two links
are connected together
by a joint. By putting a pin through
holes B and
C of links 1 and 2, an open kinematic chain is formed
as shown in Fig.
1.7. The joint formed is called a pin joint also known
as a revolute or rotary
joint. Relative rotary motion between the links is possible
and the two links are said to be paired.

In Fig. 1.7
links are represented by straight lines and rotary joint by a small circle.
| |

JOINTS AND JOINT NOTATION SCHEME:
Many types of joints
can be made between two links. However,
only two basic types are commonly
used in industrial robots. These are
• Revolute (R) and
•
Prismatic (P).
The relative
motion of the adjoining links
of a joint is either
rotary or linear depending on the type of
joint.
Revolute joint: It is sketched in Fig. 1.8(a). The two links are jointed by a pin (pivot) about the axis of which the links can rotate with respect to each other.
Prismatic joint: It is sketched in Fig. 1.8(b). The two links are so jointed that these can slide (linearly move) with respect to each other. Screw and nut (slow linear motion of the nut), rack and pinon are ways to implement prismatic joints.
Other types of possible joints
used are: planar
(one surface sliding
over another surface); cylindrical (one link rotates about the other at 90° angle,
Fig. 1.8(c)); and spherical (one link can move with respect to the other in three dimensions). Yet another variant
of rotary joint
is the 'twist' joint, where two links remain aligned
along a straight
line but one turns (twists)
about the other around the link
axis, Fig. 1.8(d). At a joint, links are connected
such that they can be made to move relative
to each other by the actuators. A rotary joint allows a pure rotation
of one link relative to the connecting link and prismatic joint
allows a pure translation of one link relative to the connecting link.

The kinematic chain formed by joining two links is extended by connecting
more links. To form a manipulator, one end
of the chain
is connected to the base or ground
with a joint. Such a manipulator
is an open kinematic chain.
The end-effector is connected to the free
end of the
last link, as illustrated
in Fig. 1.5. Closed kinematic chains are used in special purpose manipulators,
such as parallel manipulators, to create
certain kind of motion of the end-effector.
The kinematic chain
of the manipulator is characterized by the degrees
of freedom it has, and the
space its end-effector can sweep.
The number of independent movements that an object
can perform in a 3-D space is called the number
of degrees of freedom (DOF).
ARM CONFIGURATION:
According to joint movements and arrangement of links, four well
distinguished basic structural configurations
are possible for the arm.
These are characterized by the distribution of three arm
joints among prismatic and rotary joints,
and are mimed according to the coordinate system employed or the
shape of the space they sweep. The four basic configurations are:
(i) Cartesian (rectangular) configuration - all three P joints.
(ii)
Cylindrical configuration – one R and two P joints.
(iii)
Polar (spherical) configuration - two R and one P joint.
(iv) Articulated (Revolute or Jointed-arm) Configuration - all three R joints.
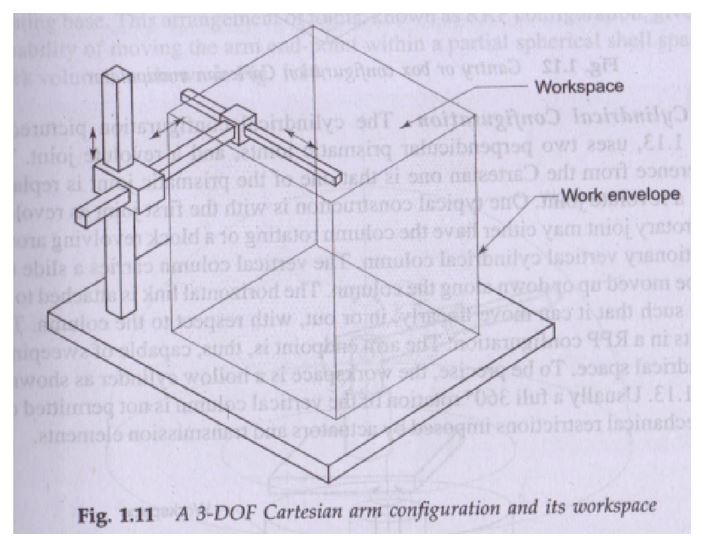
CARTESIAN (RECTANGULAR) CONFIGURATION:
This is the simplest configuration with all three
prismatic joints, as shown in Fig. 1.11.
It is constructed by three perpendicular slides, giving only linear motions
along the three principal axes. There is an
upper and lower limit for movement of each link.
Consequently, the endpoint
of the arm is capable
of operating in a cuboidal space,
called workspace.
CYLINDRICAL CONFIGURATION:
The cylindrical configuration pictured in Fig. 1.13, uses two
perpendicular prismatic joints, and a revolute
joint. The difference from the Cartesian one is that
one of the prismatic joint
is replaced with a
revolute joint. One typical construction is with the first joint as revolute. The rotary joint
may either have the column rotating
or a block revolving around
a stationary vertical
cylindrical column. The vertical column carries a slide that
can be moved
up or down along the
column. The horizontal link is attached to the slide
such that it can move linearly, in or out, with respect
to the column. This results in a RPP configuration. The arm endpoint
is, thus, capable
of sweeping a cylindrical space.
To be precise, the
workspace is a hollow cylinder
as shown in Fig. 1.13.
Usually a fu11
360° rotation of the
vertical column is not permitted due to mechanical restrictions imposed by actuators and transmission
elements.

POLAR (SPHERICAL) CONFIGURATION:
The polar configuration is illustrated in Fig. 1.14. It consists
of a telescopic link (prismatic joint) that can be raised or lowered about
a horizontal revolute
joint. These two
links are mounted
on a rotating base. This arrangement of joints, known
as RRP configuration, gives the capability of moving the arm
end-point within a partial spherical
shell space as work volume,
as shown in Fig. 1.14.

Articulated (Revolute or Jointed-arm) Configuration:
The articulated arm is the type that best simulates a human arm and a manipulator with this type of
an arm is/often referred as an anthropomorphic manipulator. It consists of two
straight links, corresponding to the human "forearm" and "upper arm" with two rotary joints corresponding to the
"elbow" and "shoulder" joints.
These two links are mounted
on a vertical rotary table corresponding
to the human waist joint.
Figure 1.15 illustrates the joint-link arrangement for the articulated arm.
This configuration (RRR)
is also called
revolute because three
revolute joints are employed. The work
volume of this configuration is spherical shaped,
and with proper
sizing of links
and design of joints,
the arm endpoint can sweep a full spherical space.
The arm endpoint can reach the base point and below
the base, as shown in Fig. 1.15. This anthropomorphic structure is the most dexterous one, because all the joints are revolute, and the positioning accuracy varies with
arm endpoint location
in the workspace. The range of industrial applications of this arm is wide.

Comments
Post a Comment